
RP6 Autonomous Robot Kit

















RP6 Autonomous Robot Kit
Awesome!
Copy and Share the Below URL
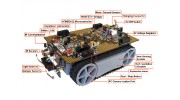
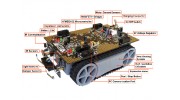
The RP6 is a low cost, autonomous mobile Robot System. It is equipped with several Sensors and a powerful ATMEGA32 8-Bit RISC Micro-controller, which is programmable in C with freely available open source tools. Further it offers good expansion and customization possibilities.
The RP6 is ideal for education purposes at universities or schools and of course for hobby users!
It comes with a very extensive manual along with lots of example programs and a huge 'C' language function library. This makes programming easy and you can instantly start with the Robot. All library and example programs are open source (GNU GPL)!
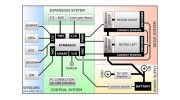
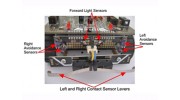
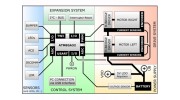
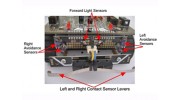
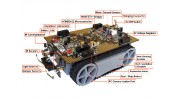
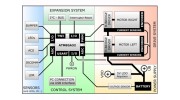
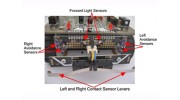
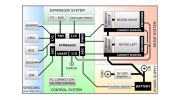
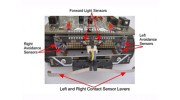
The RP6 Robot is the evolution of the very successful C-Control RP5 (CCRP5), released in 2003 by Conrad Electronics. The RP6 only reuses the chassis of the RP5 with some additional mounting possibilities. Everything else is a complete redesign. New control electronics with much bigger and faster processor, new gearing system for noise reduction, 150x higher resolution encoder (625 CPR) for precise speed regulation and several other new features like a USB Interface, a Bumper Panel in front of the Robot, a very flexible I²C-Bus based Expansion System and the six small expansion areas on the Main board. Standard Anti-collision-system (ACS) which can detect obstacles with an integrated IR receiver and two IR diodes aligned to left and right. Detects obstacles in the middle, left or right of the robot's front.
Lots of expansion modules are planned or already available. For example the RP6 CONTROL M32 processor expansion board with additional ATMEGA32, external 32KB SPI EEPROM, LC-Display Port, Microphone sensor, Buttons, LEDs, a Beeper, free I/Os and ADCs is already available and of course the experimentation board for your own circuits, which is already included in the RP6 Robot System and available separately!
Sensors - as Standard:
Anti-collision-system (ACS) – left, right and centre obstacle detection
Sensitivity and transmitter power are adjustable, allowing reliable detection of badly reflecting objects.
Two light sensors . e.g. for light intensity measurement and light source tracking
Two bumper sensors for collision detection
6 Status LEDs for sensor and program status displays
Four LED Ports can also be used for other functions if necessary!
Two free Analogue/Digital Converter (ADC) Channels for external sensor systems (Alternatively available as standard I/O Pins)
Equipment:
• ATMEGA32 processor
• Sturdy and easily adjustable speed sensor
• Optimized MOSFET motor driver
• Extensive sensors and sample programs
• Power supply connectors (2 x 5 V and 1 x 7.2 V)
• Connection for additional battery packs and charging electronics
• 1 x I ² C bus terminal
• 4 Digital x and 2 x A / D converter terminals.
Included Items:
a - Completely assembled Robot
b - RP6 USB Interface
c - USB A->B cable
d - 10pin flat cable
e - RP6 CD-ROM
f - Quick-start Manual
g - RP6 Experiment board
h - 4 x 25mm M3 distance bolts
i - 4 x M3 screws
j - 4 x M3 nuts
k - 4 x 4pin connectors
l - 2 x 14pin flat cable
Required Items:
6 x AA NiMh Rechargeable Batteries
NiMh Battery Charger
Dimensions(L x W x H): 172 x 128 x 50 mm
Power consumption: ~ 500mah
-
 RP6 Autonomous Robot
RP6 Autonomous Robot

| RP6 Manual EN | Download [3692] |
| Manual | Download [3021] |
Only registered users can upload files.
Please log in or register to start helping your fellow hobbyists today!


