
Un regulador electrónico de velocidad (ESC) es un circuito electrónico cuya finalidad principal es variar la velocidad de un motor eléctrico y su dirección.
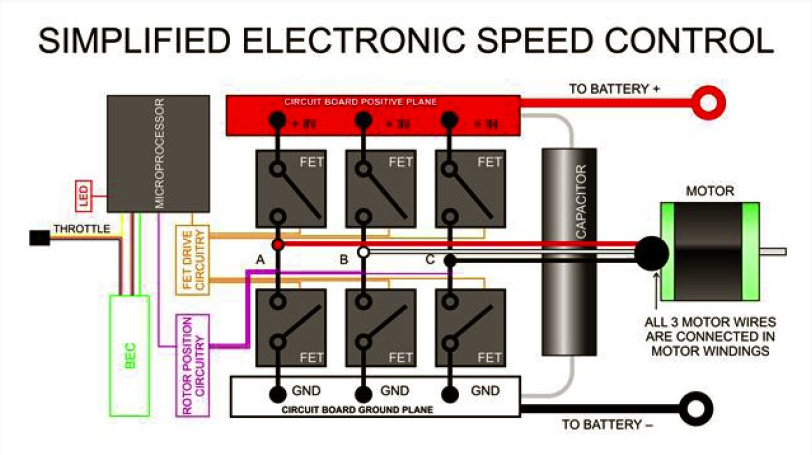
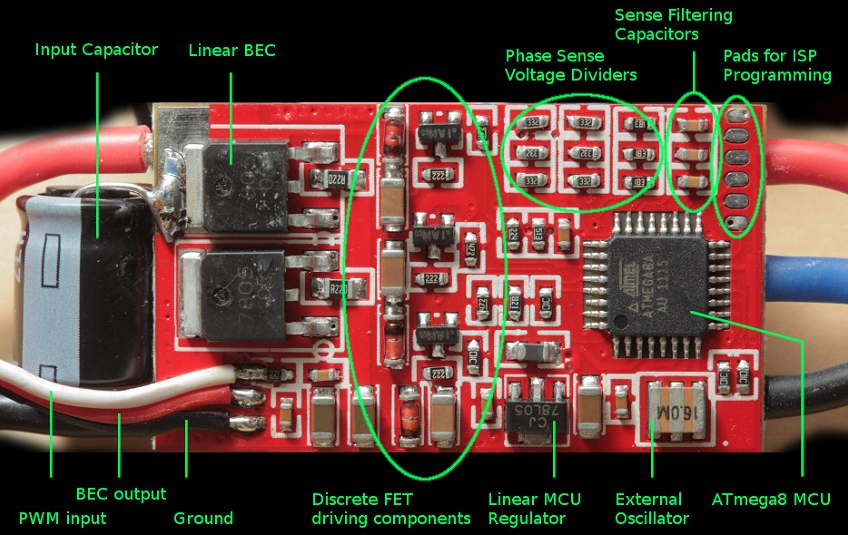
Tanto si el ESC es para un motor con escobillas como para uno sin escobillas, el ESC interpreta la información de control. Esto no es como en un movimiento mecánico como se encuentra en el caso de las unidades servo, sino más bien de una manera que varía la velocidad de conmutación de una red de "Transistores de Efecto de Campo", o más comúnmente conocidos como FETs. La rápida conmutación de estos transistores es lo que hace que el propio motor emita su característico zumbido agudo, especialmente perceptible a bajas velocidades. Estos FETs también permiten un control de la velocidad del motor mucho más suave y preciso y de forma mucho más eficiente que los antiguos reguladores de velocidad de tipo mecánico. Tiene una bobina resistiva y brazos móviles, que veríamos en muchos modelos de hace unos años, especialmente en el mundo del aeromodelismo. La mayoría de los ESCs modernos con escobillas y sin escobillas incorporan un "Circuito Eliminador de Batería" (BEC) para regular un voltaje estable para hacer funcionar el receptor y los servos, esto elimina la necesidad de tener que llevar una batería extra en el modelo. Los BEC suelen ser "lineales" o "de modo conmutado".
BEC's lineales
Un BEC lineal básicamente utiliza una resistencia para bajar el voltaje de los 7.4v-11.1v que comúnmente usamos con nuestras Lipo packs hasta los 5 voltios requeridos para el receptor. Cuanto más alto sea el voltaje de la Lipo y más energía consuma el RX, más calor se generará a medida que la corriente fluya sobre esta resistencia. Demasiada corriente se sobrecalentará y dañará tu regulador electrónico de velocidad o BEC. Por no mencionar que también desperdicia mucha electricidad, especialmente con aviones eléctricos más grandes.
BEC's conmutados
Los BEC's conmutados conectan y desconectan el voltaje muy rápidamente para bajar el voltaje de forma efectiva sin generar calor o desperdiciar electricidad. Algunos BEC's conmutados también te permiten elegir si tu receptor se alimenta con 5v o 6v, dependiendo de cómo y qué tipo de avión vuelas. Esta conmutación del voltaje ha sido conocida por causar alguna interferencia en el pasado con algunos equipos de radio, pero este tipo de interferencia ha sido eliminada hoy en día con la mayoría de los equipos modernos de 2.4GHz. Como regla general, es mejor usar un BEC conmutado si tu batería liPo tiene cuatro o más celdas y donde se requieren altas demandas de potencia. Los ESC, en un sentido más amplio, son controladores de "modulación de ancho de pulso" (PWM) para motores eléctricos. Su receptor emite una señal PWM de 50Hz al ESC con una variación de 1ms a 2ms, a 1ms el motor estará parado, a 1,5ms el motor funcionará a media velocidad, y a 2ms funcionará a máxima velocidad, usted, por supuesto, obtiene un control de velocidad suave entre estos números. Los ESC para motores con escobillas son muy diferentes de los ESC para motores sin escobillas y no son compatibles entre sí. Debes usar un ESC brushless con un motor brushless y un ESC brushed con un motor brushed. Son bastante fáciles de identificar, ya que un ESC con escobillas tiene 2 cables de motor y un ESC sin escobillas tiene 3 cables de motor.
Control de un motor con escobillas
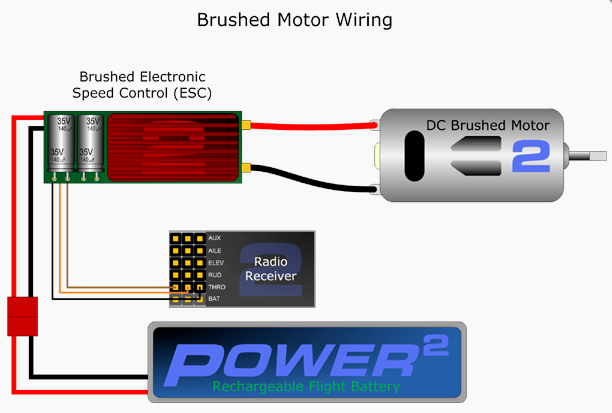
Como usted sabe, un motor con escobillas funciona más o menos mecánicamente mientras se aplique un voltaje. Para controlar la velocidad del motor, el ESC de escobillas simplemente enciende y apaga el voltaje, esto se hace muy rápidamente y muchas veces por segundo. Para aumentar la velocidad del motor, el ESC simplemente aumenta la cantidad de tiempo que el voltaje se enciende y disminuye la cantidad de tiempo que el voltaje se apaga. Para reducir la velocidad del motor, el proceso se invierte. El punto clave en la comprensión de la diferencia entre un ESC con escobillas y un ESC sin escobillas es que el ESC con escobillas no se preocupa por la posición de la armadura del motor con escobillas, etc, como se mencionó anteriormente, simplemente enciende y apaga la tensión.
Control de un motor sin escobillas
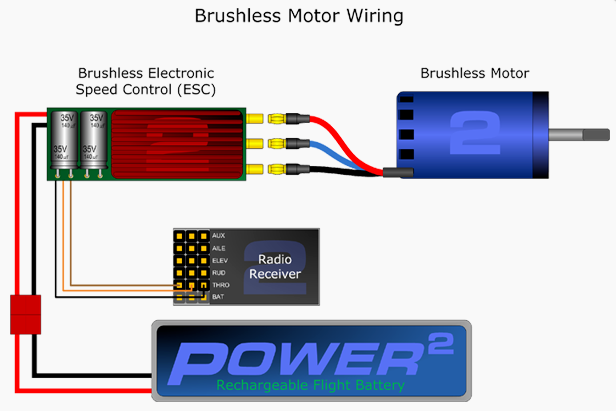
Debido a que los motores sin escobillas funcionan de manera completamente diferente, controlarlos es un proceso totalmente diferente. Sin escobillas, el ESC no tiene idea de la posición de las bobinas/estator. Necesita algún tipo de retroalimentación del motor para determinar exactamente cuándo energizar cada polo. Los ESC sin escobillas básicamente crean una "salida de energía de CA trifásica a partir de una fuente de energía de CC para hacer funcionar el motor mediante el envío de una secuencia de señales de CA generadas por los circuitos del ESC. Aquí es donde entran los 3 cables, sólo 2 de los cables son energizados por el ESC en cualquier momento. El polo que no está energizado en un instante específico generará una pequeña cantidad de voltaje que es proporcional a la velocidad con la que el motor está girando; esto se conoce como "Fuerza electromotriz trasera" (Back EMF). Esta pequeña tensión es utilizada por el ESC para determinar la velocidad y el sentido de giro del motor en un momento dado. Con esta información, el ESC sabe cómo enviar energía a los electroimanes para que el motor siga girando. Esta detección de la posición y lo que el motor está haciendo también se puede lograr mediante el uso de un sensor magnético de "Efecto Hall '' o detector "Óptico", estos se encuentran más comúnmente con ESCs de coches de modelo y motores sin escobillas In-Runner. Los motores Outrunner suelen ser controlados con el estilo de controladores "Back EMF".
Los controladores de velocidad programables por ordenador suelen tener opciones especificadas por el usuario que permiten ajustar los límites de corte de baja tensión, la temporización, la aceleración, el frenado y el sentido de giro, y hoy en día mucho más. También se puede invertir el sentido del motor cambiando dos de los tres cables del ESC al motor.
Cómo elegir un regulador de velocidad electrónico
Los ESC están clasificados por la corriente máxima que pueden manejar. Cuanta más corriente tenga un variador, más caro y pesado será. Elija un regulador de velocidad electrónico que esté clasificado para una corriente ligeramente superior a la que su combinación de motor y hélice puede manejar a pleno rendimiento. Demasiada corriente dañará un regulador de velocidad electrónico muy rápidamente. Por otro lado, un ESC demasiado grande es un peso muerto que afectará negativamente al rendimiento de su avión, es más caro y simplemente no es necesario. Las baterías LiPo se dañarán permanentemente si el voltaje de cualquier celda cae por debajo de los 3,0 voltios. Por esta razón, las baterías LiPo requieren un controlador electrónico de velocidad con un corte de bajo voltaje (LVC). El LVC cortará la alimentación del motor cuando el voltaje alcance los 3,2V, o lo que usted programe previamente para el corte. También tendrá que elegir un ESC que pueda manejar el voltaje del paquete de baterías que planea utilizar, la clasificación de voltaje para cada ESC está claramente indicada en las especificaciones.
Resumen
Este es un breve resumen, no demasiado técnico, sobre el funcionamiento de los reguladores electrónicos de velocidad, espero que hayas disfrutado de su lectura y que ahora entiendas un poco mejor cómo funcionan.
Escrito por Garythegliderpilot
------
Escúchelo primero: únase a nuestra lista de correo
Regístrese para recibir nuevas actualizaciones de productos, descuentos exclusivos, noticias y más.





