

Un contrôleur électronique de vitesse (ESC) est un circuit électronique dont le but principal est de faire varier la vitesse d'un moteur électrique et sa direction.
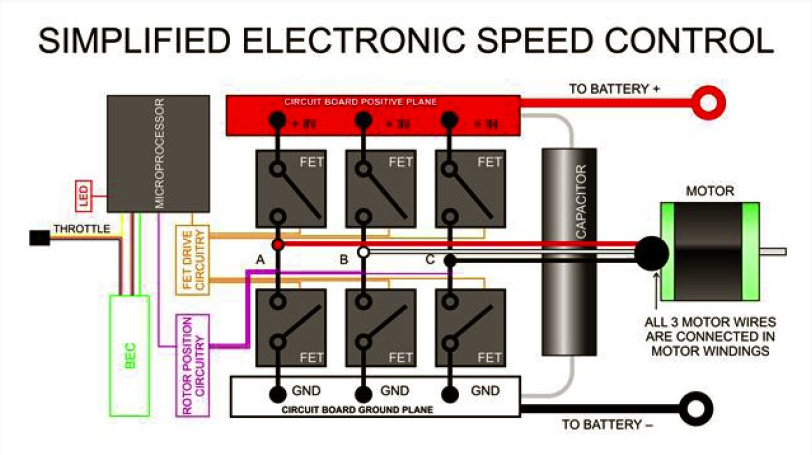
Que le contrôleur soit destiné à un moteur à balais ou sans balais, il interprète les informations de commande. Celle-ci ne se traduit pas par un mouvement mécanique comme on le trouve dans le cas des servomoteurs mais plutôt par une variation de la vitesse de commutation d'un réseau de "Transistors à Effet de Champ", ou plus communément appelés FETs. C'est la commutation rapide de ces transistors qui fait que le moteur lui-même émet son sifflement aigu caractéristique, particulièrement perceptible à basse vitesse. Ces transistors à effet de champ permettent également un contrôle de la vitesse du moteur beaucoup plus souple et plus précis, et ce de manière beaucoup plus efficace que les anciens régulateurs de vitesse de type mécanique. Il possède une bobine résistive et des bras mobiles, que l'on voyait dans de nombreux modèles il y a quelques années, notamment dans le monde des voitures miniatures. La plupart des ESC modernes à balais et sans balais intègrent un "circuit d'élimination de la batterie" (BEC) pour réguler une tension stable afin de faire fonctionner le récepteur et les servos, ce qui supprime la nécessité de transporter une batterie supplémentaire dans le modèle. Les BEC sont généralement soit "linéaires", soit "à découpage".
BECs linéaires
Un BEC linéaire utilise essentiellement une résistance pour abaisser le voltage de 7.4v-11.1v que nous utilisons couramment avec nos packs Lipo jusqu'aux 5 volts requis pour le récepteur. Plus la tension de la lipo est élevée et plus le RX consomme de puissance, plus la chaleur est générée lorsque le courant passe sur cette résistance. Trop de courant va surchauffer et endommager votre contrôleur électronique de vitesse ou BEC. Sans compter que cela gaspille aussi beaucoup d'électricité, surtout avec les gros avions électriques.
Les BECs à commutation
Les BECs à commutation commutent la tension très rapidement afin de réduire efficacement la tension sans générer de chaleur ni gaspiller d'électricité. Certains BEC commutés vous permettent également de choisir si votre récepteur est alimenté en 5v ou en 6v, en fonction de la façon dont vous volez et du type d'avion que vous utilisez. Cette commutation de la tension a été connue pour causer des interférences dans le passé avec certains équipements radio, mais ce type d'interférence a été pratiquement éliminé avec la plupart des équipements modernes de 2,4 GHz. En règle générale, il est préférable d'utiliser un BEC commuté si votre batterie LiPo a quatre éléments ou plus et si des demandes de puissance élevées sont requises. Dans un sens plus large, les ESC sont des contrôleurs à modulation de largeur d'impulsion (PWM) pour les moteurs électriques. Votre récepteur envoie un signal PWM 50Hz à l'ESC avec une variation de 1ms à 2ms, à 1ms le moteur sera à l'arrêt, à 1,5ms le moteur tournera à mi-vitesse, et à 2ms il tournera à pleine vitesse, vous, bien sûr, obtenez un contrôle de vitesse lisse entre ces chiffres. Les ESC pour moteurs à balais sont très différents des ESC pour moteurs sans balais et ne sont pas compatibles entre eux. Vous devez utiliser un contrôleur sans balais avec un moteur sans balais et un contrôleur à balais avec un moteur à balais. Ils sont assez faciles à identifier, car un ESC à brosse a 2 fils de moteur et un ESC sans brosse a 3 fils de moteur.
Contrôle d'un moteur à balais
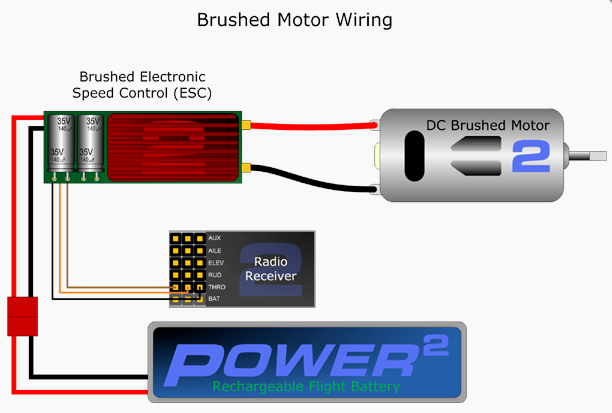
Comme vous le savez peut-être, un moteur à balais fonctionne plus ou moins mécaniquement tant qu'une tension est appliquée. Pour contrôler la vitesse de rotation du moteur, le contrôleur brossé allume et éteint simplement la tension, ce qui est fait très rapidement et plusieurs fois par seconde. Pour augmenter la vitesse du moteur, l'ESC augmente simplement le temps pendant lequel la tension est appliquée et diminue le temps pendant lequel la tension est coupée. Pour ralentir le moteur, le processus est inversé. Le point clé pour comprendre la différence entre un ESC à balais et un ESC sans balais est que l'ESC à balais ne se soucie pas de la position de l'armature du moteur à balais, etc, comme mentionné précédemment, il se contente d'activer et de désactiver la tension.
Contrôler un moteur sans balais
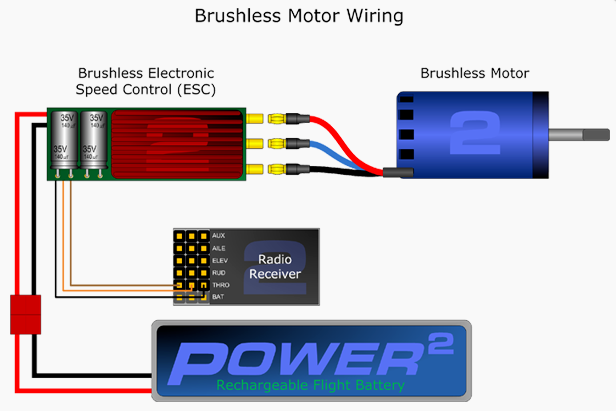
Comme les moteurs sans balais fonctionnent de manière complètement différente, leur contrôle est un processus entièrement différent. Sans balais, l'ESC n'a aucune idée de la position des bobines/du stator. Il a besoin d'une sorte de retour d'information du moteur pour déterminer exactement quand alimenter chaque pôle. Les ESC sans balais créent essentiellement une "sortie de puissance AC triphasée à partir d'une source de puissance DC pour faire tourner le moteur en envoyant une séquence de signaux AC générés par les circuits de l'ESC. C'est là que les 3 fils entrent en jeu, seuls 2 des fils sont alimentés par l'ESC à un moment donné. Le pôle qui n'est pas alimenté à un moment donné génère une petite quantité de tension proportionnelle à la vitesse de rotation du moteur ; c'est ce qu'on appelle la "force contre-électromotrice" (Back EMF). Cette petite tension est utilisée par le contrôleur électronique pour déterminer à quelle vitesse et dans quel sens le moteur tourne à un moment donné. Grâce à cette information, l'ESC sait comment envoyer de l'énergie aux électro-aimants pour que le moteur continue de tourner. Cette détection de la position et de ce que fait le moteur peut également être réalisée à l'aide d'un capteur magnétique à "effet Hall" ou d'un détecteur "optique", que l'on trouve plus souvent sur les ESC de voitures miniatures et les moteurs sans balais In-Runner. Les moteurs Outrunner sont généralement contrôlés par des contrôleurs de type "Back EMF".
Les contrôleurs de vitesse programmables par ordinateur ont généralement des options spécifiées par l'utilisateur qui permettent de régler les limites de coupure de la basse tension, la synchronisation, l'accélération, le freinage et le sens de rotation, et de nos jours, bien plus encore. L'inversion du sens de rotation du moteur peut également être réalisée en inversant deux des trois fils du contrôleur électronique de vitesse vers le moteur.
Choix d'un contrôleur électronique de vitesse
Les ESC sont classés en fonction du courant maximum qu'ils peuvent gérer. Plus le courant nominal est élevé, plus le contrôleur est cher et lourd. Choisissez un contrôleur de vitesse électronique dont l'intensité nominale est légèrement supérieure à celle que votre combinaison moteur/propulseur tirera à plein régime. Un courant trop élevé endommagera très rapidement un contrôleur électronique de vitesse ! D'un autre côté, un contrôleur électronique trop gros est un poids mort qui affectera négativement les performances de votre avion, est plus cher et n'est tout simplement pas nécessaire. Les batteries LiPo seront endommagées de façon permanente si la tension d'une cellule descend en dessous de 3,0 volts. Pour cette raison, les batteries LiPo nécessitent un contrôleur de vitesse électronique avec une coupure basse tension (LVC). Le LVC coupera l'alimentation du moteur lorsque la tension atteindra 3,2 V, ou ce que vous aurez préprogrammé. Vous devrez également choisir un contrôleur électronique de vitesse capable de gérer la tension du pack de batteries que vous prévoyez d'utiliser. La tension nominale de chaque contrôleur électronique est clairement indiquée dans les spécifications.
Résumé
Ceci n'est qu'un bref aperçu, pas trop technique, du fonctionnement des contrôleurs de vitesse électroniques. J'espère que vous avez apprécié cette lecture et que vous comprenez maintenant un peu mieux comment ils fonctionnent réellement.
Écrit par Garythegliderpilot
------
Écoutez d'abord: rejoignez notre liste de diffusion
Inscrivez-vous pour recevoir de nouvelles mises à jour de produits, des remises exclusives, des nouvelles et plus encore!





