
Dipartimento Funzione Pubblica ™ BL-89601 Digital Brushless Servo HV / MG 6.0kg / 0.06sec / 56g







Dipartimento Funzione Pubblica ™ BL-89601 Digital Brushless Servo HV / MG 6.0kg / 0.06sec / 56g
Awesome!


I motori brushless Dipartimento Funzione Brushless uso serie a basso consumo per la vita del motore estesa e di conseguenza l'affidabilità, le tensioni di funzionamento HV significano anche questo servo in grado di operare direttamente da un 2s Lipoly batteria, eliminando la necessità di dispositivi di riduzione di tensione come UBECs e regolatori.
Specifiche:
Tensione: 6.0V / 7.4V
Velocità: 0.07sec / 60deg (6.0V) - 0.06sec / 60deg (7.4V)
Coppia: 5.0kg.cm (6.0V) - 6.0kg.cm (7.4V)
Dimensioni: 40mm x 20mm x 37,5 millimetri
Peso: 56g
Treno di ingranaggi: Lega Full Titanio
Motore: Brushless
Involucro: Centro dissipatore di calore in lega
Cuscinetto a sfere: 3
Piombo: 300mm HD con Universal / JR Plug
-
Servo Coppia ( kg) ( min . 0.01kg ) 6.00
-
Servo Velocità ( Sec / 60deg ) 0.60
-
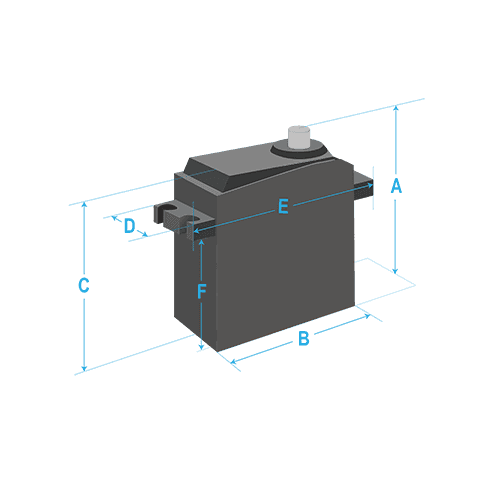
Servo A ( mm ) 44.00
-
Servo B ( mm ) 40.00
-
Servo C ( mm ) 40.00
-
Servo D ( mm ) 20.00
-
Servo E ( mm ) 55.00
-
Servo F ( MM ) 30.00
Registrati per caricare video, per favore accedi o registrati

Registrati per scrivere recensioni, per favore accedi o registrati
sutto@msn.com | Acquirente verificato
-
Overall
-
Quality
-
Value
Customer Rated
May 07, 2013
Brane18 | Acquirente verificato
-
Overall
-
Quality
-
Value
Customer Rated
Jul 24, 2012
SMPRC | Acquirente verificato
-
Overall
-
Quality
-
Value
Customer Rated
May 06, 2012
SMPRC | Acquirente verificato
-
Overall
-
Quality
-
Value
Customer Rated
May 05, 2012
Registrati per caricare i file.
Per favore accedi o registrati per iniziare subito ad aiutare gli hobbisti!
Prodotti Correlati
-
Wireless 9 in1 adattatore SimulatorSKU: 260000009-0
 15,58 €
15,58 €






