
RP6自律ロボットキット
















RP6自律ロボットキット
Awesome!


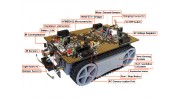
RP6は、低コスト、自律移動ロボットシステムです。これは、いくつかのセンサと自由に利用できるオープンソースのツールを使ってCでプログラム可能である強力なATMEGA32 8ビットRISCマイクロコントローラが装備されています。さらに、それは良いの拡張やカスタマイズの可能性を提供しています。
RP6は趣味のユーザーのための大学や学校で、コースの教育目的のために理想的です!
これは、サンプルプログラムと巨大な 'C'言語の関数ライブラリの多くと一緒に、非常に大規模なマニュアルが付属しています。これはプログラミングが容易になり、あなたは即座にロボットで始めることができます。すべてのライブラリと例のプログラムは、オープンソース(GNU GPL)です!
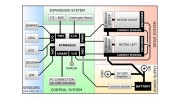
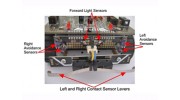
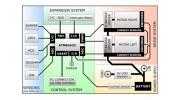
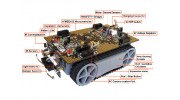
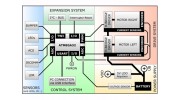
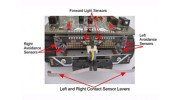
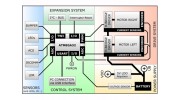
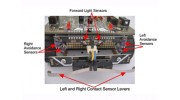
RP6ロボットはコンラッドエレクトロニクスが2003年にリリースされ、非常に成功したC-コントロールRP5(CCRP5)の進化です。 RP6は唯一のいくつかの追加実装の可能性を持つRP5のシャーシを再利用します。他のすべてが完全に再設計したものです。ロボットの前に正確な速度調整とUSBインタフェースのような他のいくつかの新機能、バンパーパネルのためのはるかに大きく、より高速なプロセッサを持つ新しい制御エレクトロニクス、ノイズ低減のための新しいギアシステム、150X高分解能のエンコーダ(625 CPR)、非常にフレキシブルなI²Cバスベースの拡張システムとメインボード上の6小さな拡張領域。左右に整列統合IR受信機と2 IRダイオードを有する障害物を検出することができ、標準的な衝突防止システム(ACS)。ロボットの前面の左または右、真ん中に障害物を検出します。
拡張モジュールの多くは、計画されたか、既に利用可能です。例えば、追加のATMEGA32、外部32キロバイトSPI EEPROMとRP6 CONTROL M32プロセッサ拡張ボード、LC-ディスプレイポート、マイクセンサー、ボタン、LEDを、ブザー、無料のI / OとADCはあなたのための実験ボードすでに利用可能であり、当然のすでに別途RP6ロボットシステムに含まれ、利用することができます独自の回路、!
センサー-標準として:
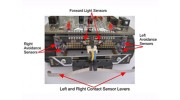
衝突防止システム(ACS) - 左、右と中央の障害物検出
感度と送信機の電源がひどく反射物体を確実に検出を可能にする、調整可能です。
二つの光センサー。光強度測定と、光源トラッキング、例えば
衝突検出のための二つのバンパーセンサ
センサーとプログラムステータス表示用の6ステータスLED
必要に応じて4つのLEDポートは、他の機能のためにも使用することができます!
外部センサシステムのための2つの自由アナログ/デジタルコンバータ(ADC)チャンネル(標準I / Oピンとして代替として利用可能)
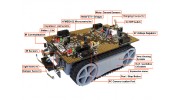
装置:
•ATMEGA32プロセッサ
•頑丈かつ容易に調整速度センサ
•最適化されたMOSFETのモータドライバ
•広範なセンサやサンプルプログラム
•電源コネクター(2×5 Vと1×7.2 V)
•増設バッテリパックと充電電子機器の接続
•1×I²Cバスターミナル
•4デジタルX 2×A / Dコンバータ端子。
含まれる項目:
A - 完全に組み立てロボット
B - RP6のUSBインタフェース
C - USB A-> Bケーブル
D - フラットケーブルを10PIN
電子- RP6のCD-ROM
F - クイックスタートマニュアル
グラム- RP6実験ボード
H - 4×25ミリメートルM3距離ボルト
私- 4×M3ネジ
J - 4×M3ナット
K - 4×4ピンコネクタ
リットル- 2×14ピンフラットケーブル
必要なもの:
6×AAニッケル水素充電式電池
ニッケル水素バッテリー充電器
外形寸法(L×幅×H):172×128×50mmの
消費電力:〜シティ500mAh


| RP6 Manual EN | Download [3692] |
| Manual | Download [3021] |





