
RP6 автономный робот Kit

















RP6 автономный робот Kit
Awesome!
Поделиться ссылкой
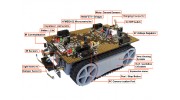
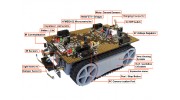
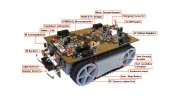
RP6 является низкая стоимость, автономный мобильный робот системы. Он оснащен несколькими датчиками и мощным ATMEGA32 8-разрядный RISC-микроконтроллер, который программируется в C со свободно доступных инструментов с открытым исходным кодом. Далее он предлагает хорошие расширения и настройки возможностей.
RP6 идеально подходит для целей образования в университетах или школах и, конечно, для пользователей хобби!
Он поставляется с очень обширным руководства наряду с большим количеством примеров программ и огромный 'C' библиотеки функций языка. Это делает программирование легко и вы можете сразу же начать с роботом. Все программы библиотеки и примеры с открытым исходным кодом (GNU GPL)!
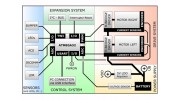
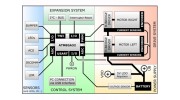
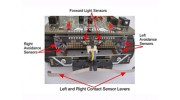
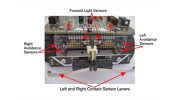
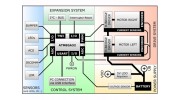
RP6 Робот является эволюция очень успешной RP5 C-Control (CCRP5), выпущенный в 2003 году Конрадом Electronics. RP6 только повторно используется шасси RP5 с некоторыми дополнительными возможностями монтажа. Все остальное полностью переработан дизайн. Новая электроника управления с гораздо большим и более быстрый процессор, новая система зубчатой передачи для снижения уровня шума, 150x более высокое разрешение датчика (625 CPR) для точного регулирования скорости и ряд других новых функций, таких как USB-интерфейс, панель бампера в передней части робота, очень гибкий I²C-Bus на основе расширения системы и шесть малых зон расширения на основной плате. Стандартный Анти-коллизия система (ACS), которая может обнаруживать препятствия со встроенным ИК-приемником и двумя ИК-диоды, выровненные влево и вправо. Обнаруживает препятствия в середине, слева или справа от передней части робота.
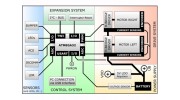
Множество модулей расширения планируются или уже доступны. Например, RP6 CONTROL M32 расширения платы процессора с дополнительным ATMEGA32, внешний 32KB SPI EEPROM, LC-Display Port, датчик микрофона, кнопки, светодиоды, бипер, свободный ввода / вывода и АЦП уже существует, и, конечно, экспериментирование доски для собственные схемы, которые уже включены в RP6 Robot System и доступные по отдельности!
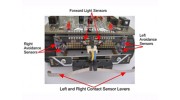
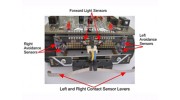
Датчики - как стандарт:
Анти-коллизия-система (ОКС) - левый, правый и обнаружение препятствий центр
Чувствительность и мощность передатчика регулируются, что позволяет надежно обнаруживать плохо отражающих объектов.
Два световых датчиков. например, для измерения интенсивности света и отслеживания источника света
Два датчика бампера для обнаружения столкновений
6 Индикаторы состояния для датчиков и программных индикаторов состояния
Четыре светодиодных портов может также использоваться для других функций, если это необходимо!
Два свободных аналогового / цифрового преобразователя (АЦП) каналы для внешних сенсорных систем (В качестве альтернативы, доступные в качестве стандартного ввода / вывода)
Оборудование:
• Процессор ATMEGA32
• Датчик скорости Крепко и легко регулируется
• Оптимизированная драйвер MOSFET двигателя
• Широкие датчики и примеры программ
• Разъемы питания (2 х 5 В и 1 х 7,2 В)
• Подключение дополнительных аккумуляторных батарей и зарядных электроники
• 1 х I ² C автобус терминал
• 4 цифровых х и 2 х A / D конвертер терминалов.
Входящие в комплект поставки:
а - Полностью собранный робот
б - Интерфейс USB RP6
с - USB A-> B кабель
d - 10pin плоский кабель
е - RP6 CD-ROM
е - Вводный Руководство
г - RP6 Эксперимент доска
ч - 4 х 25 мм M3 расстояние болты
I - 4 х винтов M3
J - 4 х М3 гайки
к - 4 х 4 - контактный разъемы
л - 2 х плоский кабель 14pin
Необходимые предметы:
6 х АА NiMh Аккумуляторы
NiMh Зарядное устройство
Размеры (Д х Ш х В ): 172 х 128 х 50 мм
Потребляемая мощность: ~ 500mAh
-
 RP6 Autonomous Robot
RP6 Autonomous Robot
Для загрузки видео необходима регистрация войти в систему или Зарегистрируйтесь

Для того, чтобы оставлять отзывы, необходимо зарегистрироваться войти в систему или Зарегистрируйтесь
| RP6 Manual EN | Download [3692] |
| Manual | Download [3021] |
Зарегистрируйтесь, чтобы загружать файлы.
пожалуйста войти в систему или Зарегистрируйтесь Начните помогать коллегам по хобби!







