
FS 08.03 Force Servo (Park Size) 1.8kg / 0.15sec / 35g
")





FS 08.03 Force Servo (Park Size) 1.8kg / 0.15sec / 35g
Copy and Share the Below URL


The Force Servo is a new type of a servo designed for robotics projects. The majority of modern servos maintain a controlled position of the arm. Other types of servos provide cyclic rotation with variable speed. The force servo provides fully controllable action force. The value of force is proportionate to the control signal and does not depend on the position of the arm. A force sensor (dynamometer) is used for controlling the force applied.
This latest advancement in servo technonolgy can simplify many setups where it's necessary to control the action force created by a servo or the action force of a mechanism controlled by a servo.
When used instead of a servo that has a controlled position, the force servo makes it possible to improve the overall control of your model.
Features:
• Suitable for robotics
• Fully controllable proportionate action force type servo
• Simple effective system that can greatly improve overall control
Specs:
Torque: 1.8kg
Speed: 0.15 sec / 60 degrees
Voltage: 5V
Non Linearity: 10%
Weight 35g
Control: PW1-2ms
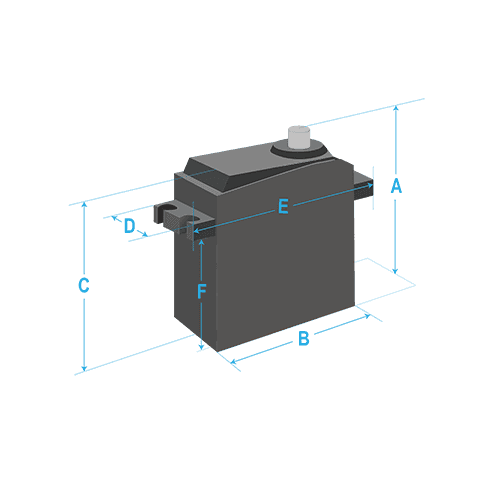
Dimensions: 32 x 34.50 x 17mm
-
Servo Torque(kg)(min. 0.01kg) 1.80
-
Servo Speed (Sec/60deg) 0.15
-
Servo A(mm) 43.50
-
Servo B(mm) 32.00
-
Servo C(mm) 34.50
-
Servo D(mm) 17.00
-
Servo E(mm) 44.60
-
Servo F(mm) 22.00

| FS 08.03 Force Servo Manual | Download [1] |
Only registered users can upload files.
Please log in or register to start helping your fellow hobbyists today!





