

Written by Painless360
Introduction:
I got into radio control via small planes and helicopters before being bitten by the quadcopter bug.
I’ve built dozens of quads, everyone different, and tend to prefer those electronics and software that provide a little help in the event of a problem with the radio, connection, or model. I’m not into FPV racing, for me, it’s all about the thrill of flying and seeing the world from a completely different viewpoint. Those of you who fly both multirotors and ‘planes will know that flying a fixed-wing model is a completely different feeling from a fast multirotor. For me flying a plane is relaxing, flying a multirotor can be anything but! Once I’d experienced the usefulness of auto-level, GPS hold, and return to home modes on multirotors I’ve wanted the same in a fixed-wing model without it costing me the earth. Systems have been available for us fixed-wing pilots but they are expensive and proprietary. Not anymore. Most of the innovation and focus from developers and manufacturers for the last few years has been on the multirotor part of the hobby, but one group of developers are bucking the trend and creating solutions and innovation for fixed wing as well. This technology is called iNavflight. Before we start warming up soldering irons and looking at installing any software let's take a step back and look at what iNav is and why it’s a little different.
iNavflight
 You will have heard of Cleanflight and Betaflight. That is the firmware that has been running on flight controllers and helping support the multirotor revolution over the past few years. Think of it like the software you run on your computer at home but this software’s job is to fly the model and constantly ‘feel’ the position and movement and make hundreds of corrections a second to make sure the model is flying exactly as the pilot wants. Designed primarily for racing this software runs on the flight controller at the heart of modern multirotors and helps pilots fly faster with more control as the models become more and more powerful and the sport of drone racing demanded faster and more precise control. The focus for innovation with Cleanflight and Betaflight has been on racing so some of the features that would be useful to non-drone racers have not made it to the top of the list. One of those features was reliable modern GPS flight modes, so we could have solid GPS Hold (where it sits in the sky) and GPS Return to Home (where it flies back to you automatically) as well as an improved failsafe to give us a chance of not losing the model when we have a radio, receiver or wiring problem. That’s where iNav comes in. It’s a version of Cleanflight that provides completely new GPS flight capabilities running on top of that well-developed software and supports both multirotors and fixed-wing too. We can now add full GPS flight modes to our aircraft using modern, inexpensive flight controllers and software. Finally. We have created a series of instructional videos on the Painless360 YouTube channel to help pilots get to grips with the iNav technology and install and use it safely in both multirotors and fixed-wing models. These articles will take you through each step, piece by piece.
You will have heard of Cleanflight and Betaflight. That is the firmware that has been running on flight controllers and helping support the multirotor revolution over the past few years. Think of it like the software you run on your computer at home but this software’s job is to fly the model and constantly ‘feel’ the position and movement and make hundreds of corrections a second to make sure the model is flying exactly as the pilot wants. Designed primarily for racing this software runs on the flight controller at the heart of modern multirotors and helps pilots fly faster with more control as the models become more and more powerful and the sport of drone racing demanded faster and more precise control. The focus for innovation with Cleanflight and Betaflight has been on racing so some of the features that would be useful to non-drone racers have not made it to the top of the list. One of those features was reliable modern GPS flight modes, so we could have solid GPS Hold (where it sits in the sky) and GPS Return to Home (where it flies back to you automatically) as well as an improved failsafe to give us a chance of not losing the model when we have a radio, receiver or wiring problem. That’s where iNav comes in. It’s a version of Cleanflight that provides completely new GPS flight capabilities running on top of that well-developed software and supports both multirotors and fixed-wing too. We can now add full GPS flight modes to our aircraft using modern, inexpensive flight controllers and software. Finally. We have created a series of instructional videos on the Painless360 YouTube channel to help pilots get to grips with the iNav technology and install and use it safely in both multirotors and fixed-wing models. These articles will take you through each step, piece by piece.
How does it work?

iNav runs on one of the dozens of inexpensive, easily available flight controllers and connects to an external GPS to monitor groundspeed, position, and altitude. It uses an external GPS unit and compass to monitor the position of the model and support the pilot with anything from simple gyro stabilization up to autonomous flying and failsafe ‘return to home’. The flight controller running iNav sits between the radio receiver and the servos and ESC on the airplane. You can fly the model just like you would traditionally where the flight controller is passive or you can ask the flight controller to provide full stabilization and auto level or do even more for you. None of this is brand new though, we have been able to add these types of abilities using flight controllers like PixHawk and APM and proprietary systems that cost lots of money and time to setup. The innovation comes from two things; you can use a £20 flight controller with a £20 GPS and the code is being actively developed and improved as part of the latest generation of technology providing new features and enhancements all the time. The other interesting feature is the large percentage of the iNav users that are already using it on their models. Version 1.6 of iNav came out at the end of February 2017 and the next versions will continue to have a very heavy development bias towards improving fixed-wing support.
So?

The benefit of this kind of system in a fixed-wing comes in a few ways. Let’s talk about some of the ‘plane specific flight modes too...
New Pilot
Using auto stabilization will ensure that a pilot learning to fly cannot get into too much trouble and over roll and pitch the model. They can also have the safety of being able to let go of the sticks and have the model right itself in case they get overwhelmed or lost. Features like auto-launch also simplify the process of hand launching for new pilots too...
Pilots flying in less than ideal conditions
Using a flight controller can help iron out the effects of wind and turbulence from a model to help provide a more enjoyable experience. It can also support certain maneuvers helping keep the flight smooth and graceful and also provide an ‘oh dear’ switch in case of problems.
Pilot with expensive airframe equipment
For those pilots flying a model with a lot of equipment on-board like cameras and other expensive technology having the additional ‘failsafe’ of the model flying back in the event of a problem can be an extra level of protection against losing the model or causing damage when it finally lands far away from the take-off point. By using FPV technology that displays the GPS location as the model is flying is a handy way to make sure that the location is tracked and recorded too. Using radios like the Taranis you can receive this GPS data and save it onto the telemetry logs and view the flight in Google Earth as a permanent record of the trip. Adding technology like a GPS, flight controller, and associated software does add extra points of failure to a model but any pilot who’s had their bacon saved by an ‘oh dear’ switch or a GPS mode that flew the model home will testify to the value of having an auto level and GPS RTH mode.
What will I need to build a fixed-wing mode with iNav then?
 The really nice thing about iNav is that you don’t need an expensive flight controller and extra bits to get it to work. All you need is F3 based flight controller and a good GPS module. That’s it. We are using a flight controller like the Omnibus F3 AIO V1.1 board here but iNav supports lots of different ones. You can buy a flight controller that will fit the bill for less than £20. You will also need a GPS module. There is a number that is recommended in the iNav documentation (https://github.com/iNavFlight/inav/wiki), we use the M8N GPS here. Again this can be bought for around £20. So for £40, you can add all of the features you’d expect on a GPS-enabled multirotor and a few more too!
The really nice thing about iNav is that you don’t need an expensive flight controller and extra bits to get it to work. All you need is F3 based flight controller and a good GPS module. That’s it. We are using a flight controller like the Omnibus F3 AIO V1.1 board here but iNav supports lots of different ones. You can buy a flight controller that will fit the bill for less than £20. You will also need a GPS module. There is a number that is recommended in the iNav documentation (https://github.com/iNavFlight/inav/wiki), we use the M8N GPS here. Again this can be bought for around £20. So for £40, you can add all of the features you’d expect on a GPS-enabled multirotor and a few more too!
So what else can it do?
iNav is now becoming a distant cousin of the Cleanflight project it was created from. The Multirotor software works very well and all of the innovation recently has been for us, fixed-wing pilots. Here are a few highlights of the extra goodness in here for us ‘plane flyers...
OSD Support
Using boards with inbuilt OSD circuitry you can easily add an OSD display to the FPV gear on your wing. Want to know your height, direction, battery status, distance, and direction to home? All of that and more are simple to set up and use.
PIFF controller
PID controllers get talked about a lot! PID is good for multirotor and ‘ok’ for fixed-wing but PIFF (Proportional, Integral, and Feed Forward) control systems are better for the control of ‘planes as it more closely matches the behavior of a human pilot and accounts for the delay in the movement of a control surface and the effect on the orientation of the model. It’s easier to set up and tune too. In the next version of iNav (v1.7), there will be an auto-tune function to make it even easier.
Improved failsafe
The failsafe in software like Cleanflight and Betaflight isn’t perfect. iNav has beefed up the code and made the failsafe easier to setup and more robust. Any problem with the signal from the radio or the receiver is considered a ‘failsafe’ condition and you can configure the model to crash, land, or return to the launch position when a failsafe occurs.
Extra plane specific modes (i.e. Launch Mode)
This is one for us wing flyers. So, you’re in a field, holding the wing at one tip, ready to throw and using your teeth to set the throttle. Sound familiar? Launching a model can be one of the trickiest parts even with a good setup model with enough power. Getting a clean throw and getting control before it sinks to the ground can be challenging. What if you could simply throw the model into the air and have it automatically climb into the sky safely? You can now: that is called ‘Launch Mode’ in iNav.
Easy support for extra things like OLED displays...
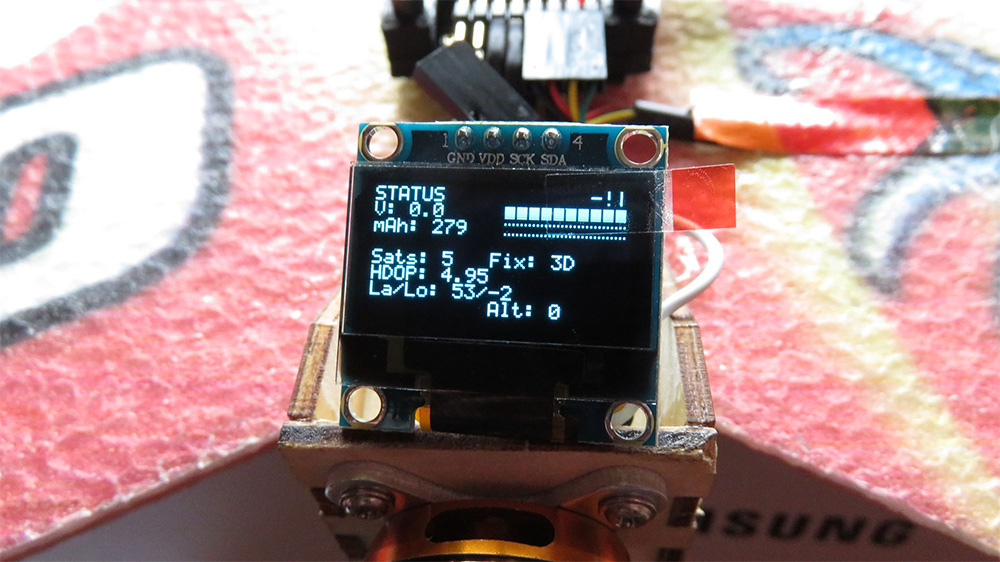 In addition to all of the cool features, there are many more too. Too many to go into in this introduction article but here’s one... You can easily add a little display to the board. The little OLED screens cost about £7 (see, it’s not expensive, this is it!) and you can mount this on your model and it shows the battery health, status of the GPS lock and other things too. Very handy and maybe cool for a scale cockpit?
In addition to all of the cool features, there are many more too. Too many to go into in this introduction article but here’s one... You can easily add a little display to the board. The little OLED screens cost about £7 (see, it’s not expensive, this is it!) and you can mount this on your model and it shows the battery health, status of the GPS lock and other things too. Very handy and maybe cool for a scale cockpit?
Where can I go to see more about this stuff?
In this series of articles, we will look at iNav in far more detail and go through all of the steps to wire, setup and build the model and then get into the air and test it all safely. I will write the articles and assume a very low level of knowledge about the flight controller and all of the associated technology so most plane pilots should be easily able to follow the steps.
Summary
 The fixed-wing community for iNav is one of the fastest-growing in the hobby. Adding GPS modes to a model makes all kinds of flying safer and less stressful. Flying FPV is great as if you start to reach the range of the FPV signal or have a problem then you can simply flick the ‘oh dear’ switch and engage the GPS return to home mode and have the model fly back to you automatically. Auto-level that limits the pitch and roll angles can help a new pilot get into the air and stay there while they learn how to fly the model. As will be a relaxing way to fly for FPV when you’re looking for a relaxing ride. Join me in the coming months as we build out this series and take you step by step into the world of fixed-wing models with flight controllers and useful GPS flight modes. Until next time... Happy flying!
The fixed-wing community for iNav is one of the fastest-growing in the hobby. Adding GPS modes to a model makes all kinds of flying safer and less stressful. Flying FPV is great as if you start to reach the range of the FPV signal or have a problem then you can simply flick the ‘oh dear’ switch and engage the GPS return to home mode and have the model fly back to you automatically. Auto-level that limits the pitch and roll angles can help a new pilot get into the air and stay there while they learn how to fly the model. As will be a relaxing way to fly for FPV when you’re looking for a relaxing ride. Join me in the coming months as we build out this series and take you step by step into the world of fixed-wing models with flight controllers and useful GPS flight modes. Until next time... Happy flying!
Hear it First: Join our Mailing List
Sign up to receive new product updates, exclusive discounts, news, and more!





