
If you’re building your own multicopter, you have many choices available when it comes to selecting a flight computer.
You will find varying pricing and features which may create confusion. Some flight computers are born through open source projects and others developed under a proprietor. Price is not everything. However, it all comes down to two main things:
- The amount of time you want to spend installing software and tuning
- Your skills and experience
That said, if you're willing to take the time to learn and; you have a methodical approach to things, you will most likely enjoy setting up a flight computer. We have outlined some of the most common flight computers in the market below to assist you in making a decision.
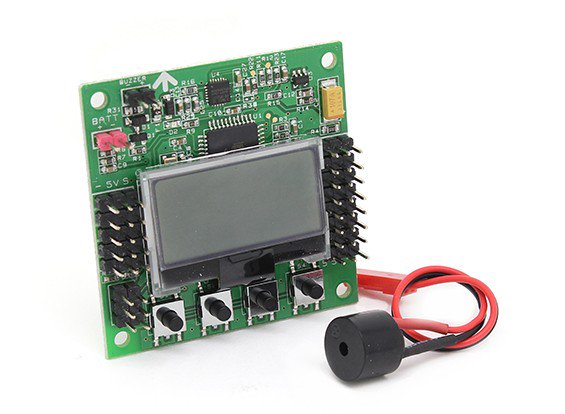
HobbyKing KK2.1.5 Flight Control Board
A basic flight computer used throughout the multicopter community because of its reliability, flexibility, and low price. Suitable for basic to advanced flying without the aid of GPS. This flight computer is easy to setup.
Naze 32 Flight Controller
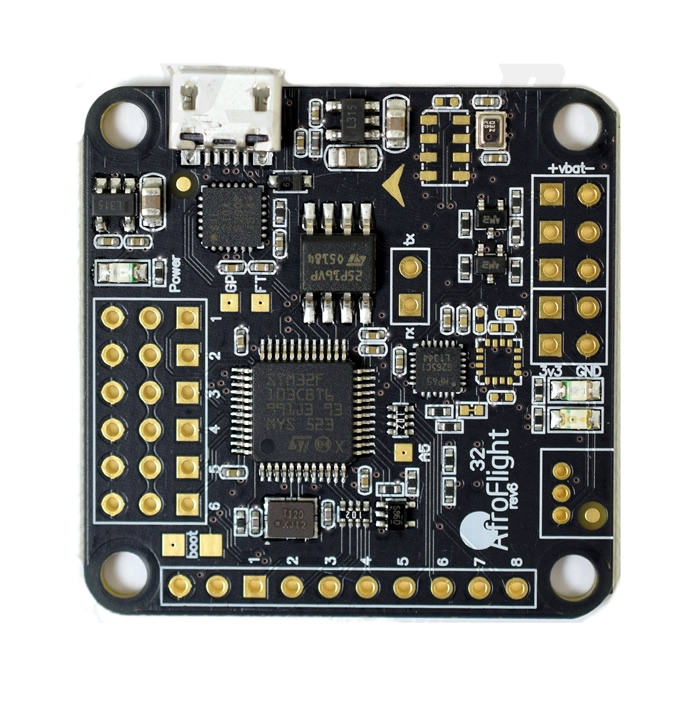 A low-cost flight computer offered in different versions with additional sensors for acro flying (racing, playing around…). This flight computer is easy to setup.
A low-cost flight computer offered in different versions with additional sensors for acro flying (racing, playing around…). This flight computer is easy to setup.
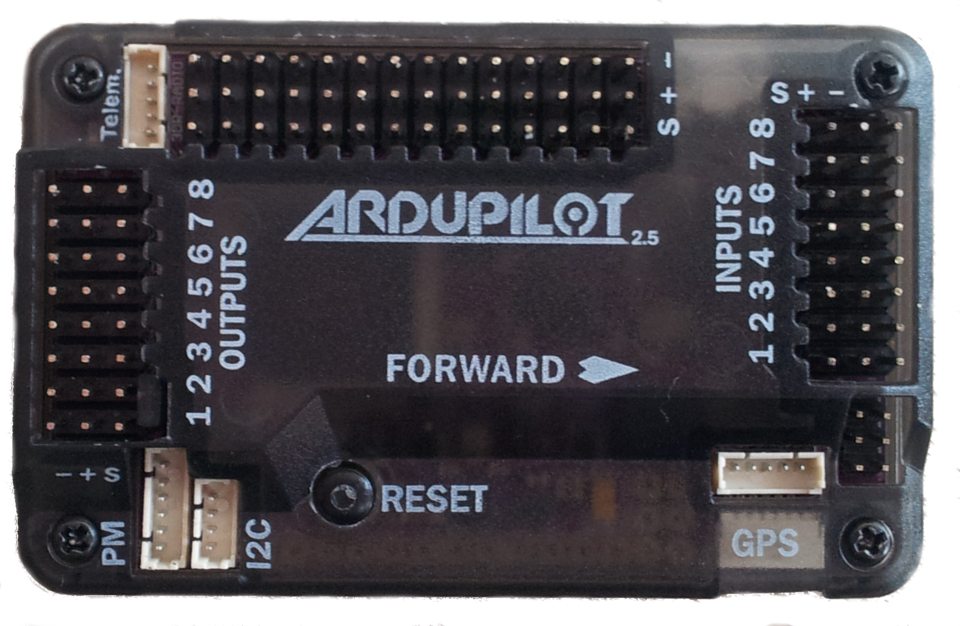
Arducopter (APM)
A more advanced flight computer that is no longer manufactured by 3DR but there are good copies out there. This flight computer will allow you to control any air, land, or sea vehicle and has automation and mission planning capabilities. There is a mass community following in relation to this flight computer because of its relatively low cost (when taking all the features into account). There is a bit more involved in tuning this flight computer. When done right, the results are incredible in terms of smooth flight and automation i.e return to home when signal lost, position hold, and altitude hold.
Pixhawk
This is a more advanced version of Ardupilot produced by 3DR with many improvements.  This flight computer will allow you to control any air, land or sea vehicle and has automation and mission planning capabilities. There is a mass community following in relation to this flight computer because of its relatively low cost (when taking all the features into account). There is a bit more involved in tuning this flight computer. When done right, the results are incredible in terms of smooth flight and automation i.e return to home when signal lost, position hold, and altitude hold…
This flight computer will allow you to control any air, land or sea vehicle and has automation and mission planning capabilities. There is a mass community following in relation to this flight computer because of its relatively low cost (when taking all the features into account). There is a bit more involved in tuning this flight computer. When done right, the results are incredible in terms of smooth flight and automation i.e return to home when signal lost, position hold, and altitude hold…
DJI Naza
DJI has really created a compelling product at a low price point with the Naza Range. For around $100, you have a flight computer with GPS stabilization, return to home when the signal is lost, position hold, and more. This platform is easy to set up with software guiding you and plenty of support on the web. You will notice there is a cost difference between all of the above. This is because some of the solutions are open source, for example, Ardupilot and Pixhawk. Others however are produced by a proprietor like the DJI Naza.  Price doesn’t always mean better! Depending on what you’re looking to do, it may be that the HobbyKing KK2 board is perfect. For about $20.00, you have a stable flight computer that will get you in the air and having fun! However, spend $80.00 more and you have something like the DJI Naza offering, which is great for aerial photography and videography at an entry-level.
Price doesn’t always mean better! Depending on what you’re looking to do, it may be that the HobbyKing KK2 board is perfect. For about $20.00, you have a stable flight computer that will get you in the air and having fun! However, spend $80.00 more and you have something like the DJI Naza offering, which is great for aerial photography and videography at an entry-level.
ESCs
Choosing the right ESCs will ensure a smooth flight that has a more dialed in feeling. There are two main firmware types being used today in most multicopters: SimonK or BLHeli. Put simply, these two types of firmware are specifically written for multicopters and perform better. By having ESCs running on the mentioned firmware, you can expect a much smoother flight and a more responsive multicopter which in turn will provide a better experience and results depending on what you’re doing. There is little difference between SimonK and BLHeli firmware that is noticeable. When you’re shopping for your ESCs, it’s important to take the following into consideration:
- Has SimonK or BLHeli firmware installed
- How many volts can the ESC handle?
- How many amps can the ESC handle?
- The plug type
- Placement of the ESC on the airframe (Think about wire length and cooling)
- The ESC will need to measure up in volts and amps for your motor and prop combination.
Motors
The motors on your multicopter are pretty important. After all, they’re what’s keeping you in the air! All motors have ratings that are important when it comes to making the right decision.
KV
This relates to the number of revolutions per minute a brushless motor will make per volt i.e. 900KV on an 11.1V batter will spin at 9990RPM.
Volts
Every motor has a voltage range that cannot be exceeded otherwise you will burn your engine out.
Outrunner
 Your motor will need to be an outrunner styled motor. This means that the motor armature stands still and the case spins around it. You will also need to take into consideration what the bolt pattern is on your motor and if that is compatible with your airframe. Most manufacturers outline bolt spacing on brushless motors and airframes so you can marry the two up. In addition, most airframes have multiple holes in the engine mount position to allow an array of motors to fit. After conducting some research you may notice that the smaller multicopters like racing drones have a higher KV value and the motors are much smaller. This is because they are spinning much smaller props and need to spin faster to generate a sufficient amount of lift. In addition, this also provides the multirotor with agility. For larger multicopters like camera drones, the KV rating is much lower and can sometimes be as low as 300KV. This is because they’re spinning very large props that generate a great deal of lift, every rotation, in turn, requiring lower revolutions to produce enough lift to get off the ground. A multicopter like this does not need to be super agile.
Your motor will need to be an outrunner styled motor. This means that the motor armature stands still and the case spins around it. You will also need to take into consideration what the bolt pattern is on your motor and if that is compatible with your airframe. Most manufacturers outline bolt spacing on brushless motors and airframes so you can marry the two up. In addition, most airframes have multiple holes in the engine mount position to allow an array of motors to fit. After conducting some research you may notice that the smaller multicopters like racing drones have a higher KV value and the motors are much smaller. This is because they are spinning much smaller props and need to spin faster to generate a sufficient amount of lift. In addition, this also provides the multirotor with agility. For larger multicopters like camera drones, the KV rating is much lower and can sometimes be as low as 300KV. This is because they’re spinning very large props that generate a great deal of lift, every rotation, in turn, requiring lower revolutions to produce enough lift to get off the ground. A multicopter like this does not need to be super agile.
Battery
Batteries come in all shapes and sizes including capacity and voltage. Obviously, the battery contributes to the overall weight. It’s a tough call to have the optimum battery because the bigger the battery, the more weight, and the more energy stored. It would be easy to assume longer flight times but that’s not always the case. Every multicopter has its sweet spot in terms of efficiency or agility. It’s also equally important to choose the right battery that will provide enough amp draw when at full power on your multicopter. To determine this:
- How many amps is each motor drawing at half throttle (approximate hover) and full throttle with all gear onboard?
- Determine a batteries maximum constant amp draw: battery mAH / 1000 X battery C rating. For instance, if you have a 2200mAH battery rated at 30C: 2200 / 1000 X 30 = 66 amps.
Camera gimbal
A camera gimbal allows you to take great footage that even in the roughest conditions where the multicopter is moving about.  If you’re planning on taking still shots, you may be able to live without a gimbal. However, if you’re looking to work less hard to get that nice shot, a gimbal is a must. For video, you’re going to need a gimbal as it not only stabilizes the footage, it also eliminates what is called the “jello effect”. This is where there is a shake in the footage making it almost unwatchable. There are many camera gimbals in the market that vary in size, number of pivoting points (axis), and price. Start with the type of camera you need to carry. The most common camera used is a GoPro by far. Most gimbals in the market accommodate a GoPro. Arguably, the best value gimbals on the market are offered by Tarot. They provide a well-performing unit for the GoPro camera at a great price of around $100. This is great for anyone starting out, all the way through to the more serious flyers looking for semi-professional results. Gimbals are normally powered by a distribution power board (the same device powering your motors – see the next section).
If you’re planning on taking still shots, you may be able to live without a gimbal. However, if you’re looking to work less hard to get that nice shot, a gimbal is a must. For video, you’re going to need a gimbal as it not only stabilizes the footage, it also eliminates what is called the “jello effect”. This is where there is a shake in the footage making it almost unwatchable. There are many camera gimbals in the market that vary in size, number of pivoting points (axis), and price. Start with the type of camera you need to carry. The most common camera used is a GoPro by far. Most gimbals in the market accommodate a GoPro. Arguably, the best value gimbals on the market are offered by Tarot. They provide a well-performing unit for the GoPro camera at a great price of around $100. This is great for anyone starting out, all the way through to the more serious flyers looking for semi-professional results. Gimbals are normally powered by a distribution power board (the same device powering your motors – see the next section).
Power distribution board
Power distribution boards come in many different sizes and ratings. Some boards come with different voltage and amp outputs (one output for motors and the other output for a camera gimbal or other electronics). This is a relatively cheap item, which you will need to make sure will handle the total amount of amps being drawn by all your on-board electronics. You will need to calculate the absolute maximum amount of amps your motors and other electronics will be drawing in amps. If you exceed the power distribution boards maximum amp or voltage rating, you could lose your multicopter in the air. Written by Thomas
Hear it First: Join our Mailing List
Sign up to receive new product updates, exclusive discounts, news, and more!





