

The last few years have seen an explosion of the multirotor part of the hobby and driven a huge amount of innovation in the flight controllers and the software and firmware that runs them.
Ask a handful of pilots for advice on which you should use and you will get many different answers depending on their experience, models they use and style of flying. You often get pilots recommending the same flight controller with different software and firmware! With the wealth of choice now available to us how do we choose a flight controller for our plane or multirotor? There are so many boards driven by the Open-Source community that we now have access to features and capabilities that would have cost hundreds of pounds only a few years ago. As with many aspects of the hobby, the place to start is to look at what you want to do with it and working from there to find the flight controller and software/firmware you need. No flight controller or software is all things to all pilots so being clear on what you want and what you need is key. Common questions that help a pilot or builder choose the right combination for them to include:
- What type of model will it be in? (quadcopter, plane, wing, glider, hexacopter)
- How will I fly this model (racing, camera rig, lazy FPV, hard 3D flying, a combination?)
- Do I need GPS support for modes like a return to launch (RTL) or position hold?
- Do I want the model to be able to fly autonomously? The more you define your needs the clearer the choices become. So, what’s DOF?
Before we look at the common flight controllers used in the hobby it’s useful to look at something called Degrees of Freedom (DOF). DOF is a shorthand way to explain how many sensors are on the flight controller and how they are arranged. For a flight controller to be able to provide basic flight stabilisation 6DOF is needed, for a flight controller to have the hardware to offer more sophisticated flight modes including GPS then 9DOF or more is needed.
- 3DOF - You rarely see flight controllers with this limited amount of sensors anymore. It could refer to a 3 axis gyroscope OR a 3 axis accelerometer.
- 6DOF - This is now the most basic of the flight controller and can use be used for basic stabilisation only. The 6 DOF refers to the 3 axis accelerometer that detects side to side movement and a 3 axis gyroscope that detects rotation in all axes.
- 9DOF - This is a flight controller with a 3 axis accelerometer that detects side to side movement and a 3 axis gyroscope that detects rotation in all axes and also includes a magnetometer (compass) needed for GPS flying.
- 10DOF - This commonly refers to a flight controller that has all the same sensors you would find on a 9DOF board but also includes a barometer that measures air pressure - useful for maintaining height.
- 11DOF- This is normally used to refer to a board that has all of the sensors of a 10DOF board but also includes a GPS sensor. These are used for GPS assisted flight and autonomous flying as well as modes like ‘return to launch’.
Some of the most common Open-Source flight controllers:
APM (ArduPilot Mega)
Ratings:
- Features = 5
- Ease of Use = 4
- Price = 2
- Longevity = 2
Use for super stable flight and great GPS and autonomous flying This was one of the first full features flight controllers. It’s now available in lots of versions and sizes making it simple to fit into all types and sizes of model. The 10DOF board has a full range of sensors and can be used with a GPS for truly autonomous flight.  The setup is easy too with a wizard in the software on your PC/Mac that walks you through the setup for the model you are using. The board was designed and built to support multiple model types so the APM is just as comfortable flying in a plane, glider, wing, helicopter or multirotor and the firmware even supports boats, cars and even tanks so you can not only control your model directly but use the capabilities of the APM to run pre-loaded missions on its own too. Missions with waypoints can be programmed and the board before take-off can be used with telemetry radios to monitor the craft wirelessly in flight and also send new commands and update the mission. This board also supports sensors like airspeed to provide extra abilities like automated take-off and landing. The challenge with this board is its age. The APM is an 8-bit board with limited memory by today’s standards so the development of the firmware for it stopped in 2015. Despite that this is highly popular and its low price and ease of use make it a great choice. While this board is great for stable, graceful flying it struggles with the demands from race pilots.
The setup is easy too with a wizard in the software on your PC/Mac that walks you through the setup for the model you are using. The board was designed and built to support multiple model types so the APM is just as comfortable flying in a plane, glider, wing, helicopter or multirotor and the firmware even supports boats, cars and even tanks so you can not only control your model directly but use the capabilities of the APM to run pre-loaded missions on its own too. Missions with waypoints can be programmed and the board before take-off can be used with telemetry radios to monitor the craft wirelessly in flight and also send new commands and update the mission. This board also supports sensors like airspeed to provide extra abilities like automated take-off and landing. The challenge with this board is its age. The APM is an 8-bit board with limited memory by today’s standards so the development of the firmware for it stopped in 2015. Despite that this is highly popular and its low price and ease of use make it a great choice. While this board is great for stable, graceful flying it struggles with the demands from race pilots.
PixHawk/PixRacer
Ratings
- Features = 5
- Ease of Use = 4
- Price = 3
- Longevity = 5
Use for super stable flight and autonomous flying and the new PixRacer is an option for fast-flying too This is the successor to the APM and also includes a full range of sensors and can be used with a GPS for truly autonomous flight. The setup is easy too with a wizard in the software on your PC/Mac that walks you through the setup for the model you are using in exactly the same way.  The board can also support multiple model types. The PixHawk is as comfortable flying the entire model set that the APM can. Missions with waypoints can be programmed and the board before take-off can be used with telemetry radios to monitor the craft wirelessly in flight and also send new commands and update the mission too. The board uses newer, more accurate sensors compared to the APM and also uses sensor redundancy for added safety. It comes with a very fast ARM-based processor and lots of memory and is undergoing continual development at the moment. There is a very new smaller version of the board available now called the PixRacer that provides most of the features of the full-size flight controller but in a much smaller package so that drone racers and pilots with smaller planes can use this flight controller too. This board is becoming a true all-rounder; great for stable, graceful flying and the PixRacer delivering the fast accurate response that pilots want for drone racing.
The board can also support multiple model types. The PixHawk is as comfortable flying the entire model set that the APM can. Missions with waypoints can be programmed and the board before take-off can be used with telemetry radios to monitor the craft wirelessly in flight and also send new commands and update the mission too. The board uses newer, more accurate sensors compared to the APM and also uses sensor redundancy for added safety. It comes with a very fast ARM-based processor and lots of memory and is undergoing continual development at the moment. There is a very new smaller version of the board available now called the PixRacer that provides most of the features of the full-size flight controller but in a much smaller package so that drone racers and pilots with smaller planes can use this flight controller too. This board is becoming a true all-rounder; great for stable, graceful flying and the PixRacer delivering the fast accurate response that pilots want for drone racing.
Naze32 (Flip32)
Ratings
- Features 4
- Ease of Use 3
- Price 2
- Longevity 4
Designed and used by the majority of racers - the board has raced at its heart The Naze32, and its many clones like the Flip32 and Skyline32 are some of the most common boards used in multirotors today. Available in two different versions – a 6DOF and a 9DOF version – they provide a stable platform for software like Cleanflight and Baseflight that are very popular in racing circles. Due to a large number of clone boards from China, this flight controller is now very inexpensive and available in many different sizes and layouts. The board is now on Revision 6 of the original design but it is starting to show its age with a slower processor and less memory then newer flight controllers.  Versions of firmware add some exciting additional features to both versions of the board that include the ability to add sonar sensors, programmable LED lights, telemetry and lots of options for on screens displays (OSD) for first-person view flying. The board can be used in many model types that include various multirotors, planes and helicopters. Sadly, although a GPS can be added to the board any GPS code is still classed as ‘experimental’ in Cleanflight so can’t be used reliably to provide GPS flight modes. The latest generation of flight controllers use the newer STM32 processor, improved sensors and have much more memory and extra abilities above the classic Naze32 boards, examples are the Seriously Pro SP3 and the Team Black Sheep Colibri among others. The improvements in the performance of these more capable boards will make them a more supported choice moving forward.
Versions of firmware add some exciting additional features to both versions of the board that include the ability to add sonar sensors, programmable LED lights, telemetry and lots of options for on screens displays (OSD) for first-person view flying. The board can be used in many model types that include various multirotors, planes and helicopters. Sadly, although a GPS can be added to the board any GPS code is still classed as ‘experimental’ in Cleanflight so can’t be used reliably to provide GPS flight modes. The latest generation of flight controllers use the newer STM32 processor, improved sensors and have much more memory and extra abilities above the classic Naze32 boards, examples are the Seriously Pro SP3 and the Team Black Sheep Colibri among others. The improvements in the performance of these more capable boards will make them a more supported choice moving forward.
CC3D Revolution
Ratings
- Features = 4
- Ease of Use = 5
- Price = 3
- Longevity = 4
Use for stable flight and autonomous flying can be used for racing too. This board (and its little brother below) are arguably two of the most underrated flight controllers today. The CC3D Revolution (or commonly known as the Revo) packs a lot of punch for their cost with 9DOF. The recent innovation in the size of the flight controller means that not only is it available in the ‘standard’ size but also in a minute package just larger than a thumbnail allowing it to be used in much smaller craft.  The Revo is an option for those that want those GPS flight modes with a whole set of advanced GPS modes that not include a ‘GPS Hold’ and ‘GPS return to launch’ mode but also include autonomous flight too. The Revo has a good processor and memory so is a platform that is gaining a lot of popularity. The Revo also provides support for OPlink radios to provide a wireless connection to a ground station to monitor the craft and send instructions and set up easily. The board will run many versions of software but the most popular and current – TauLabs and LibrePilot use simple wizards that make setup and configuration safe and simple for even the first time builder and pilot. The boards were initially hard to buy with limited quantities but boards out of China are now available broadly and have driven down the cost significantly.
The Revo is an option for those that want those GPS flight modes with a whole set of advanced GPS modes that not include a ‘GPS Hold’ and ‘GPS return to launch’ mode but also include autonomous flight too. The Revo has a good processor and memory so is a platform that is gaining a lot of popularity. The Revo also provides support for OPlink radios to provide a wireless connection to a ground station to monitor the craft and send instructions and set up easily. The board will run many versions of software but the most popular and current – TauLabs and LibrePilot use simple wizards that make setup and configuration safe and simple for even the first time builder and pilot. The boards were initially hard to buy with limited quantities but boards out of China are now available broadly and have driven down the cost significantly.
CC3D
Ratings
- Features = 2
- Ease of Use = 3
- Price = 2
- Longevity = 3
Use for super stable flight and is an excellent option for FPV or fast flying. The CC3D is similar to the Revo but only provides simple stabilisation with its 6DOF sensors. The CC3D doesn’t have the telemetry radio, GPS or faster CPU of the Revo but again is available in truly tiny packages making it perfect for simple stabilisation for planes, helicopters, and multirotors. It will run many firmware versions but using TauLabs and LibrePilot and the setup wizards make it easy to configure and setup. This is the board that I recommend new builders start with. The board is very forgiving with badly tuned models too; models that have struggled with other flight controllers have flown well with the default settings on a CC3D board.
KISS Flight controller
Ratings
- Features = 2
- Ease of Use = 5
- Price = 3
- Longevity = 3
Use for super stable flight and is an excellent option for FPV or fast flying. The KISS flight controller is becoming very popular, unlike the other boards in this list, it doesn’t use software like Mission Planner (APM), Cleanflight (Naze32 and others) or Librepilot (CC3D), but uses its own software that just supports just the KISS flight controller. This produces a tightly integrated platform with the software and hardware working very well together. There are not as many features on the KISS flight controller but what it lacks in features it makes up for in ease of use and impressive flight characteristics. Many pilots have become big fans of this board and software and when stock is available it sells out fast!
MultiWii
Ratings
- Features = 3
- Ease of Use = 1
- Price = 2
- Longevity = 2
Use for super stable flight and is an excellent option for FPV or fast flying. This was one of the boards that started it all. In fact, it’s not a single board but a project that uses Arduino code and a set of sensors to create a capable flight controller. Originally the flight controllers used the sensors from the Nintendo Wii ‘Nunchucks’ to sense movement and this is where the name came from. This board was at the start of the revolution so some of the graphical user interfaces were in their infancy. As a result, the editing, compiling and uploading the firmware is a manual process and be confusing for those not familiar with computer coding. The boards are based on 8-bit processors and have limited memory by today’s standards but do provide solid GPS flight modes. The MultiWii is a solid performer but showing its age. The code has been taken and radically updated and is now run by newer 32-bit boards like the Naze32 and STM32F3 based flight controllers. So in every flight controller running Baseflight, Cleanflight or one of the other versions has a little bit of MultiWii in there too.
KK2.X
Ratings
- Features = 1
- Ease of Use = 4
- Price = 2
- Longevity = 3
Use for basic stabilisation and simple auto level. Still a favourite among many builders. This was one of the first accessible flight controllers for Multirotor and featured an inbuilt screen for easy setup and configuration without the need for a smartphone or PC. The board can be made to stabilise planes but needs a change in the firmware on it to do so. The board and technology are now very mature but the inbuilt screen and lack of need for extra computers and cables to set it up to make it a choice for those builders who are not comfortable with all of the extra technology needed.
Other flight controllers
There are new flight controllers coming out all the time so as soon as any list is complete, it becomes outdated. In the last few weeks, we have seen the release of newer flight controllers like the Seriously Pro F3 Mini. This board is an updated and more capable flight controller than the Naze32/Fips32 we look at earlier. Other newer boards include those like the KISS flight controller, a small board that uses its own custom software for the GUI and firmware. In summary, there are lots of choices so it pays to look around before making your decision.
Some of the most commonly used software/Firmware
As we discussed some of the boards we’ve looked at can run different software. The software that runs on these flight controllers usually comes in two pieces – one to run on a PC/Mac and send the details and configure the board and the other part the actual firmware that runs on the flight controller itself. Once the flight controller has been set up and configured, most will not need to be connected to a computer again unless the pilot wants to change or add a feature.
Cleanflight/Baseflight and other derivatives
These projects provide software and firmware that will run on Naz32, STM32F3 based controller and also provides support for boards like the CC3D too. The software supports planes, wings, multirotor and helicopters.
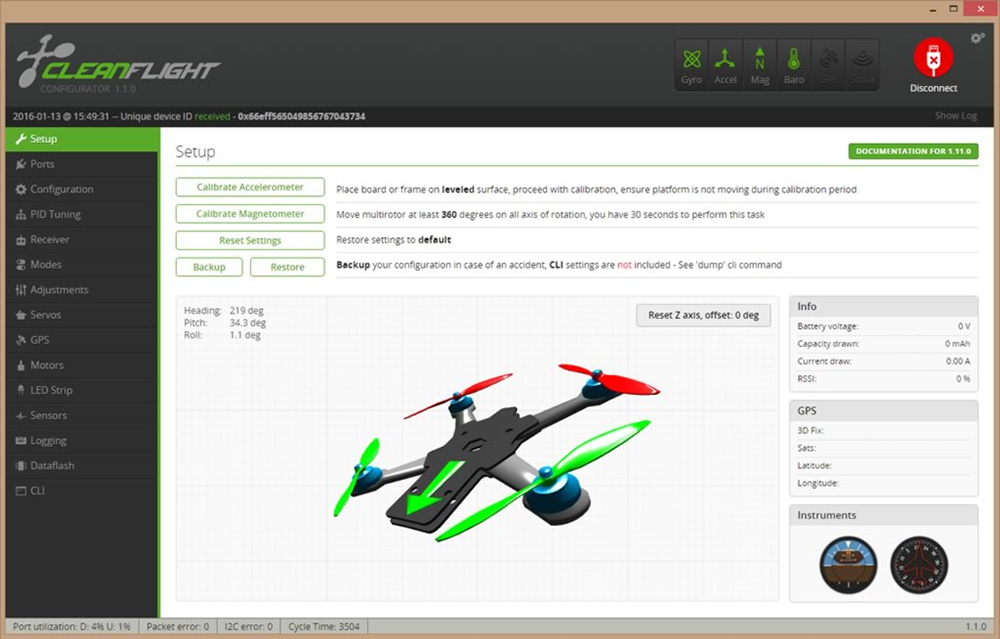
Cleanflight and Baseflight are two flavours of the same code developed from MultiWii, being developed by two different teams in slightly different directions and offer many choices for those pilots to choose the flavour that has the options they need. In addition to these two base projects, lots of other versions are now available too. Extra features like configurable LEDs for models, sonar support, telemetry, great OSD support and newer features like race timing are all being added to Cleanflight. May pilots prefer the way that these ‘feel’ on their flight controller and there is a great deal of support for these technologies in the multirotor community. Areas like GPS are still considered ‘experimental’ so for pilots needing features like ‘return to home’ this isn’t the natural choice. Focus remains on the drone racers for the majority of the innovation with the software and firmware will continue to favour innovations. The majority of FPV race pilots use Cleanflight.
LibrePilot (OpenPilot)
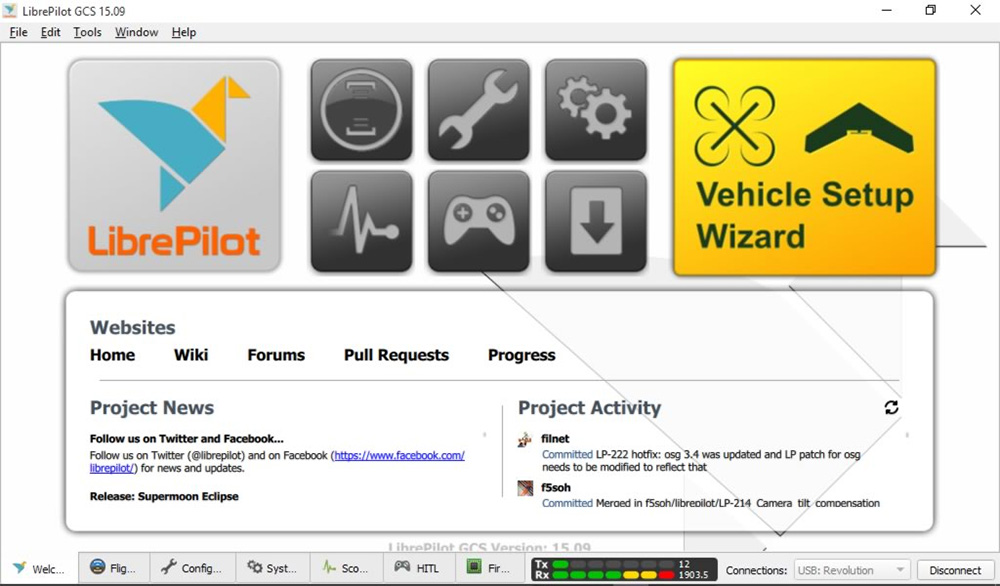
LibrePilot is one of the successors of the OpenPilot project that closed in June last year. It provides an easy to use interface to setup and configure a CCC3D or CC3D revolution flight controller. The software supports planes, wings, multirotor and helicopters. The software doesn’t yet offer as many features as Cleanflight but provides a great GPS mode (when used with the CC3D Revolution) and excellent handling. The tuning of LibrePilot is simple too with the software being very forgiving making it easy to setup. The setup wizard in LibrePilot is one of the best available and makes the setup of the model simple and easy for new builders.
Mission Planner (APM Planner, Q GroundControl)
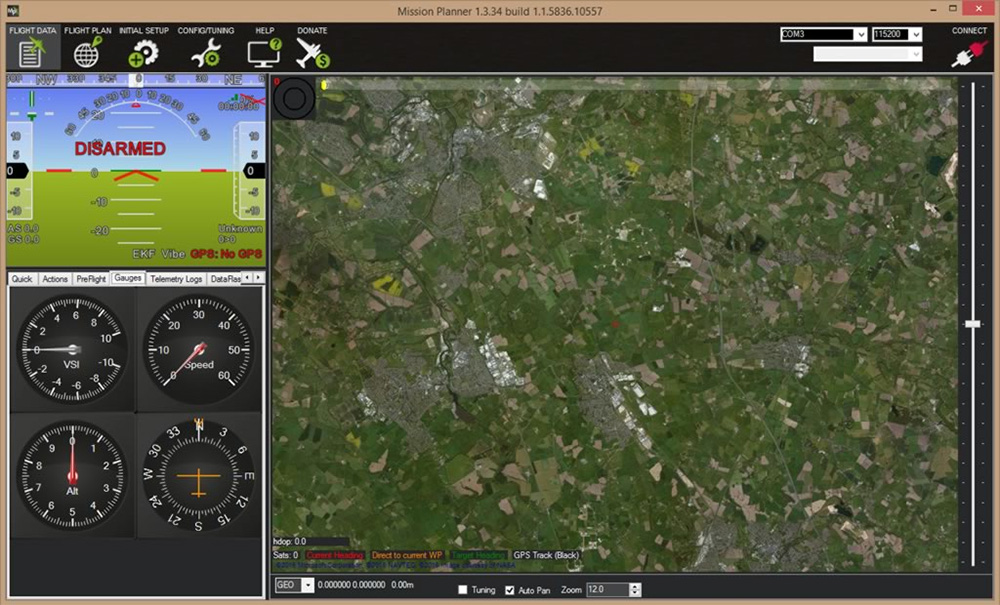
There are a number of projects that provide software for the APM and PixHawk; Mission Planner, APMplanner, QGroundcontrol and others. The software supports almost everything; planes, wings, ground vehicles, antenna trackers, multirotor and helicopters. The interface is well laid out and provides simple access to the setup and configuration of the flight controller. In addition, the software also allows the pilot to create and load ‘missions’ to have the craft operate autonomously. These products with APM or PixHawk are common choices for pilots looking to add a flight controller to their model that can provide stable flight and great GPS modes. Perfect for video or camera work.
Summary
Every pilot has their own personal favourites when it comes to flight controllers. Racers are looking for small, lightweight flight controllers that will do just enough to fly the model well and respond quickly. Others want to be able to have more advanced modes like GPS hold and return to home, which is very useful for new pilots and also for drones carrying expensive equipment. In the end, it’s a personal choice but once you understand what you want from your model, you can then start to explore the options. Personally, my advice today to pilots and builders runs something like this. “If it’s your first build and you’re not interested about GPS then use a CC3D” “If you want to race then get a KISS FC or a Naze32 or newer board with Cleanflight” “If you want GPS modes and autonomous flying (without breaking the bank), use an APM or PixHawk” “If you have a model with expensive equipment on it (cameras etc.) use PixHawk” “If you want to try the latest innovation that looks like it can do almost everything, try the PixRacer”. Happy flying!
Written by Painless360
Hear it First: Join our Mailing List
Sign up to receive new product updates, exclusive discounts, news, and more!





